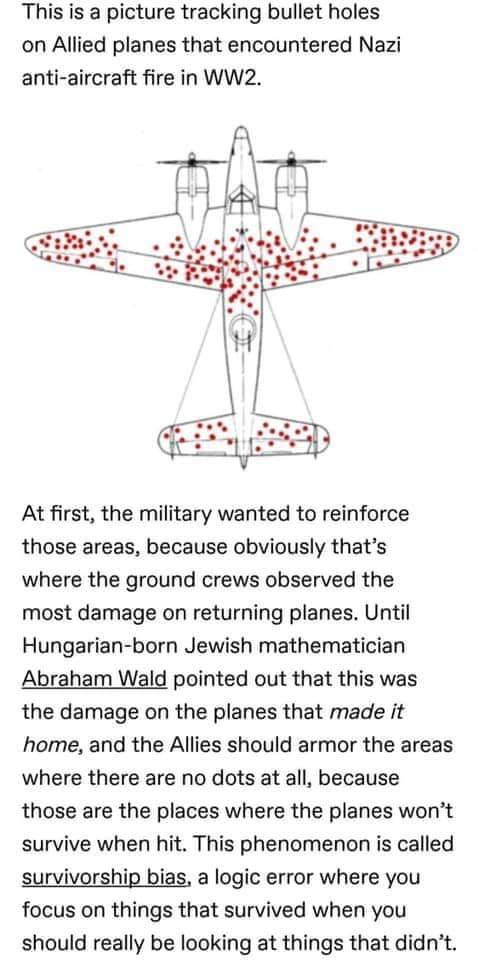
(…and a story of Survivorship Bias!)
Creating aquatic Robots is one of the most interesting things for me. One of the earliest Robots I created was an aquatic robot for a “Waterpolo” competition which was part of Tricks Robotic competition held at Indian Institute of Technology, Bombay. In the competition two teams would compete in an aquatic arena. The aim of the competition was to grab as many ping-pong balls in the arena as possible and put them in our goal post, just like in a Waterpolo match. Competitors needed to score goals while defending their goal post at the same time.
The simplicity of my Robot’s design turned out to be very advantageous. The robot design was a Multi-Hulled design. It was built over a thin ply Deck with two parallel aerodynamic Hulls of Styrofoam under the deck. The hulls were carved by hand to make them as aerodynamic as possible through trial and error method. The robot was built using two powerful 25,000 RPM brushed DC motors. There was no rudder. Differential turning was the only way of turning. There was a notch with aluminum grill in the front to hold the ping-pong balls.
The simple design of my robot which incorporated all the essential features, was significantly faster and maneuverable than other sophisticated looking robots, probably due to its low-weight characteristics and powerful but small motors. My robot could easily grab many ping pong balls during a match, and score faster than the opponents. Defending my goal post was too easy as I was able to create a wake turbulence with the help of my powerful motors that would deflect my opponent’s robots and the ping pong balls. My Robot seemed like an unconquerable beast in the competition. It finally reached the semi-finals, without a single defeat in any of the previous rounds.
However during semi-finals, I got an important lesson. That lesson was “something that works well does not need to be tweaked”!
Before the semi-finals, I decided to remove the front grills inside the notch because they were reducing the speed by a small fraction, due to the resistance they were creating. I assumed that the grills would not be needed since the notch alone was enough to grab the ping-pong balls. However during the actual match, the balls that I grabbed in the notch were lost from beneath the deck because of the wake from my own motors. This created a huge issue that I did not anticipate during the trial runs. My Robot, the Undefeated Beast, lost the semi-finals because of these unwanted design changes.
However, that BIG lesson was the takeaway from the Robotics Competition for me that proved very essential in the future!
And that is how I learned about “Survivorship Bias“, an interesting notion about logical errors!